“减速器、伺服电机、控制器”被称为人形机器人(学术界常称为“仿人机器人”,英文名“humanoid robot”)硬件部分的三大核心单元,占机器人整身成本约一半以上,尤其作为人形机器人动力源的伺服电机模块,中国与国际一线水平差距甚远。
根据 MIR 数据统计,我国伺服电机竞争格局中外资品牌占据65%,国产品牌仅有35%,从产品形态上来看,高端伺服电机几乎全部被国际大品牌垄断。以“三菱、安川、发那科、西门子”为第一梯队的伺服电机企业形成了对中国企业的技术封锁,严重限制我国双足人形机器人产业的发展。
从全球市场来看,双足人形机器人赛道代表以波士顿动力Atlas、本田ASIMO、敏捷机器人Cassie以及即将上市的特斯拉Optimus为主,而国内一些科技厂商也在最近几年开始跟进。但无一例外,这些已发布的人形机器人产品,离我们心中期望的理想状态还有非常长一段距离。
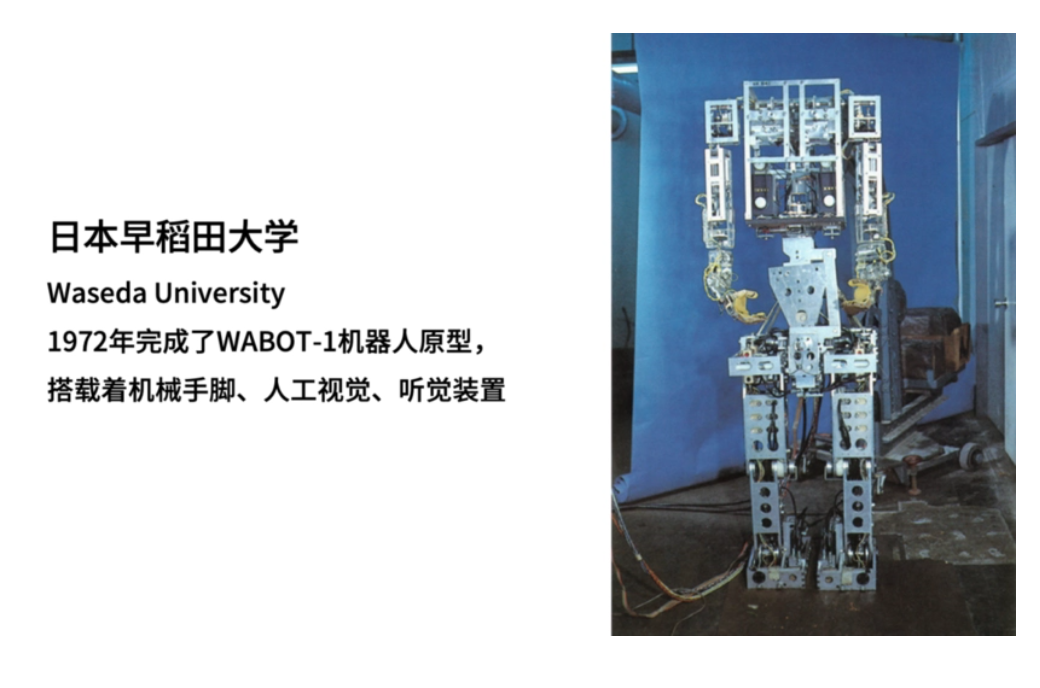
可行走的双足人形机器人起源于日本,由1972年日本早稻田大学的加藤一郎教授研发,首款产品代号为 WABOT-1机器人原型机,拥有拟人化外形,搭载机械手脚、拥有视觉听觉与肢体控制管理系统,尽管行走一步需要45秒,但这项技术在当时已经足以撼动科学界。这也是人形机器人的早期雏形。
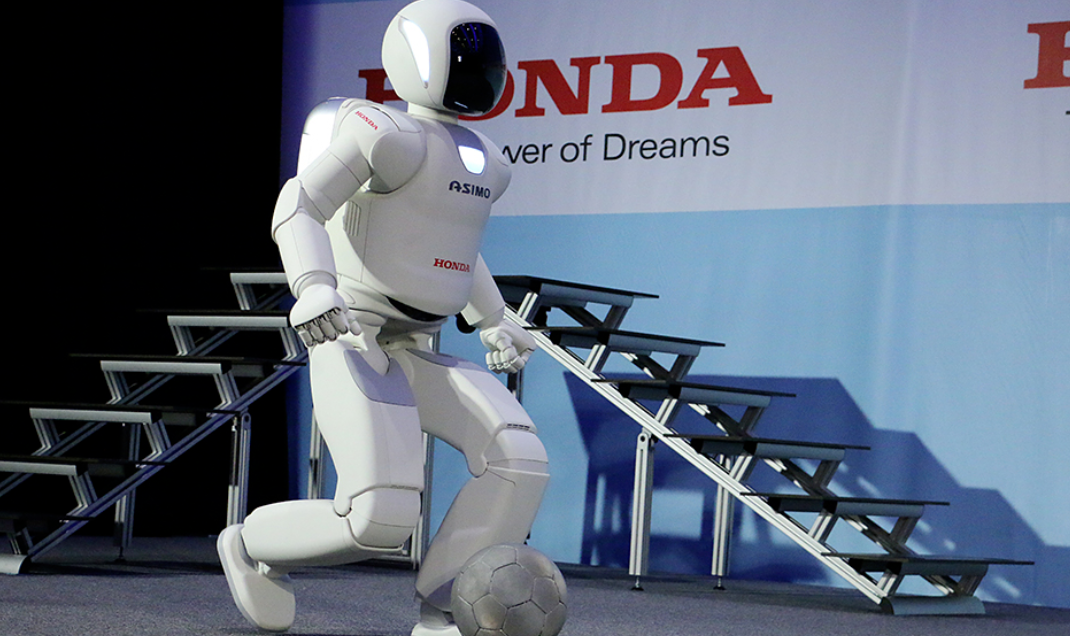
20世纪80年代,随着工业化发展,日本经济在战后迅速崛起,变成全球上最为强大的经济体之一,以本田为代表的公司相继推出不同系列的人形机器人产品,经过20年的发展,本田公司掌握了人形机器人的核心技术,1996年推出P2人形机器人,首次实现了无外接电缆的多传感器融合的人形机器人,2005年推出新一代ASIMO机器人,可以在一定程度上完成跑步、单脚跳跃、上下楼梯以及踢足球等复杂动作,是当时公认最领先的人形机器人。
美国科技公司波士顿动力于1992年成立,早期是麻省理工学院电气工程和计算机科学系的研究小组,开发机器人和机器人软件。2009年Atlas的前身Petman亮相,当时只有两条腿。2013年,初具人类外形的Atlas已经能在碎石堆上行走。虽然在之后的几年,波士顿动力三次易主,但并未影响到Atlas的快速成长。目前为止,Atlas能做到连续跳跃、翻滚、倒立等姿势,并熟练掌握体操技巧,是目前公认运动能力最强的人形机器人。

中国的双足机器人研究起步上世纪80年代末,大多分布在在高校与研究机构为主。近期国内人形机器人科研团队呈现百家争鸣态势,虽各有专长,但总实力来看北京理工大学最强,特别是在人形机器人走、跑、跳等多模态高动态运动能力及核心零部件等方面跻身世界前列。
想要让人形机器人自主运动起来,既需要极强的运动控制能力,也需要强大的感知和智慧能力。前者需要包括精密减速器、伺服电机、控制器等核心零部件的支持,而后者则需要更加高性能导航传感器和强大的计算能力。
具体来说,以往高端电机和液压动力装置想要好用,就必须要购买进口产品,但由于外资品牌对中国企业形成技术壁垒,很多时候即便我们肯花钱,对方也不一定能够卖给我们,而且即便我们通过特殊渠道买到高端电机产品,在缺乏算法与调试的场景下,依然可能与我们的理想结果差距甚远。比如同样是Maxon电机产品,Schaft公司能够最终靠液冷配合超级电容的方式让几十公斤重的机器人自己跳起来。而其他公司即便是使用相同型号的电机也很难达到这样的效果。在人形机器人领域有些技术壁垒并不是有钱就能突破的。
人形机器人的感知能力并不是机器人公司独有,很多研究无人驾驶的车企以及头部的科技公司都很早地进入到了视觉与环境感知的研发的行列当中,这也就解释了为什么特斯拉会推出人形机器人“Optimus”的原因。
底层运动算法与控制源于软件算法的优化以及大量样本采集,早些年波士顿动力的Atlas机器人就是靠实地测试一点点完成了运动规划和控制的积累。它需要大量时间来沉淀,并不是依靠资本和研发人员就能缩短研发进程的,换句话说,核心部件与底层算法是硬科技实力。
中国人形机器人发展以高校和科研机构为主,相比公司的运作模式,不必过于急迫资本变现的压力,进而能更好地专注于产品和技术本身。并且中国大量人才集中在高校,也能实现更快速的技术转化。同时中国拥有更大的增量市场,对于人形机器人市场也抱有更加开放的态度。
虽然中国模式可以更好地孕育技术的蓬勃发展,但卡脖子的问题线年,当特朗普挥手签署备忘录时,中美贸易战正式打响,中科院列出35项中国需攻坚的“卡脖子”技术清单!除了光刻机、芯片在内我们熟知的技术之外,也包括机器人核心部件、操作系统等。
转眼间5年过去了,在人形机器人核心零部件领域,通过科研院校的摸索,突破了电机、关节驱动“卡脖子”问题。其中北京理工大学团队协同国内优势力量,研发了高扭矩密度伺服电机、高爆发力控关节等核心部件,电机和关节峰值扭矩密度国际领先,初步实现了驱动核心部件自主可控。北京理工华汇智能科技有限公司(以下简称“理工华汇”)是北京理工大学学科性公司,依托于北京理工大学人形机器人团队,进行后续产业化工作,将话语权牢牢掌握在自己手中。
北京理工大学团队早在2000年就开始了第一台人形机器人的研发,仅用两年时间,第一代人形机器人汇童BHR-1就正式亮相,身高1.58m,体重76kg ,全身拥有28个自由度,率先实现了人形机器人无外接电缆行走,汇童BHR-1的研发成功,让中国成为继日本之后第二个研制出无外接电缆行走人形机器人的国家。三年后,汇童BHR-2问世,可以在一定程度上完成稳定前进,后退、下蹲、侧行、上台阶等各种行走功能,还能够完成太极拳、刀术等中国传统武术的表演动作,同时具有语音对话、平衡觉等功能。由于汇童BHR-2在复杂动作协调控制方面取得重大进展,也因此成功入选国家十五重大科学技术成就展、国家科学技术创新成就展。“汇童BHR-3”在二代基础上进行机构一体化设计,模块化设计,分布式可靠性设计,在系统工程化设计及可靠性方面有重大突破,人形机器人开始正式走出实验室,在中国科技馆、广东科学中心等实际展出。而“汇童”4则拥有多达46个自由度,突破了人类表情模拟、移动作业规划等关键技术,实现了喜、怒、哀、乐等表情动作,运动性能大幅度的提高,“汇童”5主打高爆发运动性能,全身拥有30个自由度,突破了基于高速视觉伺服的灵巧动作控制,全身协调自主反应等关键技术,实现人形机器人对打乒乓球200多个回合。实现了人形机器人高度感知与运动控制能力的演示验证。“汇童6”实现了“走、跑、跳、摔、滚、爬”多模态运动,奔跑速度达7.2km/h,跳高0.52m,跳远1.08m,是目前国际上跳得最高最远的电机驱动人形机器人。
经过23年的技术沉淀,历经6代“汇童”人形机器人产品研制,可以说,“汇童”系列机器人见证了中国人形机器人的发展史。理工华汇这家企业围绕底层算法和核心部件,经过8年试验、应用、推广,潜心研究、默默无闻。终于能够聚焦人形机器人市场,形成了人形机器人、核心部件(电机、关节)等系列化标准产品,
目前理工华汇“汇童”双足人形机器人在运动控制、导航、软件、电机、减速器等核心零部件已经实现了自主研发国产化,并且突破了高爆发一体化驱动、仿生控制、刚柔耦合系统集成等核心技术,可实现快速行走、单脚跳跃、双脚离地奔跑等一系列高难度运动。

本届2023世界机器人大会,理工华汇对“汇童”双足人形机器人进行了更新,采用新一代自研驱动部件的“汇童”人形机器人身高达到165cm,体重为55kg,整身拥有26个自由度,奔跑速度可达7km/h,跳跃高度为0.5m,双足原地跳跃距离可达1m,能够自主攀登20cm高度的楼梯,自主跨越30cm高度障碍。
此外,在轮腿式机器人研究方面,新一代电机驱动轮腿式人形机器人拥有高爆发能力,最快行进速度15km/h,且具备适应草地、下楼梯、跳跃等运动能力。此外能轻松实现轮腿运动的融合。理工华汇通过长期在双足人形机器人领域打磨,已填补国内电驱人形机器人的产业空白,对标国际市场,使中国双足人形机器人产品在国际上有一席之地。

从硬件方面来看,目前中国电驱人形机器人技术已逐渐成熟,未来我们有机会看到行动灵活性更好,机械力量更为强大的人形机器人产品。而随着ChatGPT大语言模型的加入,给予人形机器人更好的思考和交互能力。未来随着商业化大规模量产,我们将目睹中国自主研发的AGI通用人形机器人时代的到来。
我们都在说,科技改变生活,双足人形机器人就像孤勇的前行者,离开舒适明亮的科技圈,手持火把黑暗中摸索前行。火把照亮前方未知的道路,而我们就是它曾经走过的脚印。
